 Definition:
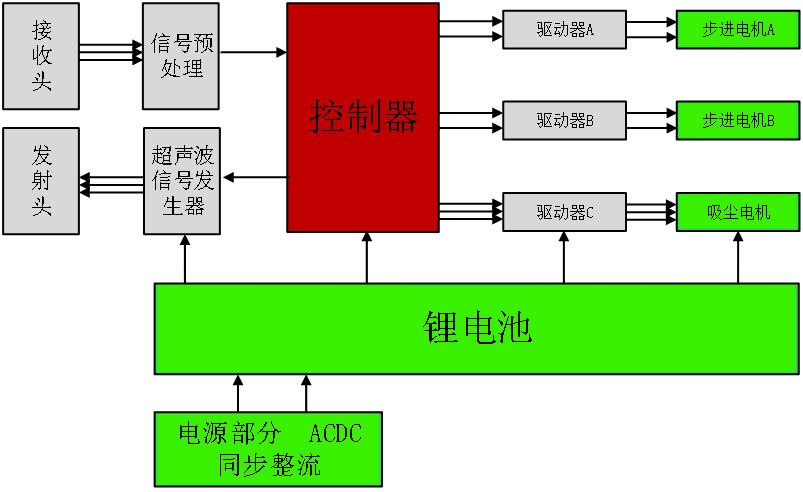
Definition:The basic architecture of the sweeping robot usually includes the central processor, power/battery management unit, battery charger, wireless communication module, human-machine interface, sensor and drive module (brushed and brushless motor). With the further improvement of market and application requirements, motor drive and lithium management are also developing in the direction of high power density, miniaturization, and long continuous working time, first of all, the power device is required to be reliable and energy-efficient, and second, a new package shape to achieve a smaller volume design is also very important.
Recommend part No.:
AC/DC charger MOS:
VDS=650V-700V Ron@10V(max)=900mΩ-2400mΩ

Synchronous rectification MOS:
VDS=100V-150V Ron@10V(max)<10mΩ

Vacuum motor:
N-channel SGT-II MOSFET 、 N-channel SGT-I MOSFET:VDS=30V Ron@10V(max)=2.3mΩ-7.1mΩ

Lithium battery charging and discharging MOS:
N-channel Trench MOSFET:VDS=30V Ron@10V(max)<11mΩ

Tel:0769-23388126
Address:No.7 Xingrong Road, Shijie Town, Dongguan City,Guangdong Province






Copyright ©2020-Guangdong lingxun Microelectronics Co., Ltd
